Project
The proposed project aims at defining a method to identify and parametrize different driving scenarios from naturalistic driving data. The final goal is to create an unbiased library of traffic scenarios to be used for virtual validation of autonomous vehicles.
Project Details
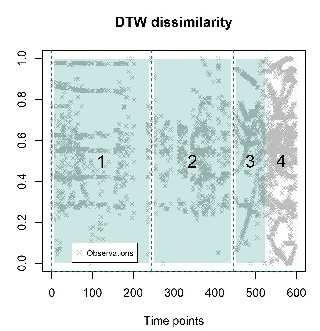
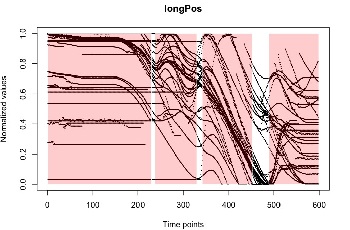
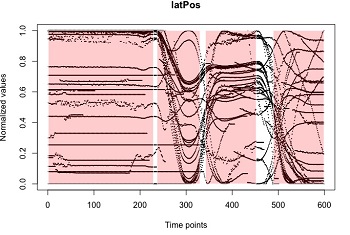
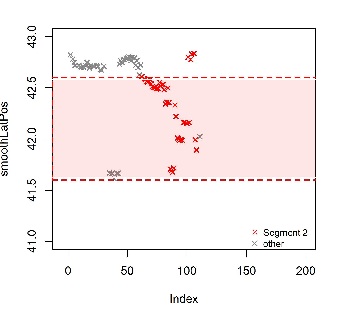
The goal of this project is to develop a clustering algorithm that produces time segments in the data corresponding to different driving scenarios. The scope of the project by only considering a small subset of the data provided by Volvo Cars. The data considered are the object data and the object attributes.
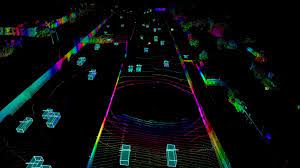
The LiDAR is collected as time series using a Velodyne LiDAR sensor. This creates a 360 degree three-dimensional point-cloud at a sampling frequency of 10 Hz. Data pre-processing techniques were employed to handle the missing data, such scaling, normalizing, log-transformation and imputation. Techniques from machine learning models, econometric models, and signal processing were employed to cluster this data. Finally the clustered data were labelled for various driving scenarios to aid ADAS
Images