Project
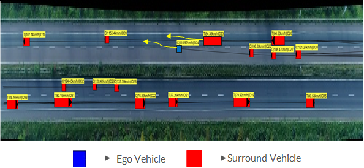
The goal of the project was to achieve a suitable prediction model of driver’s intention, in case of lane change scenarios to help in improving ADAS systems. The prediction models must be robust to predict varied situations
Project Details
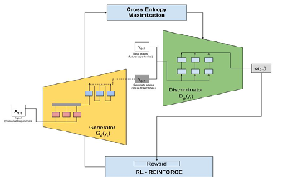
The project aimed to build a Deep Inverse Reinforcement Learning (DIRL) model to analyze and learn diverse driving behaviour during lane change scenarios. DIRL learns this behaviour by undergoing apprenticeship training from an expert. It learns the reward structure of drivers decision during lane change scenarios from such varied expert driving behaviour, and by utilizing these reward it predicts driving decision.
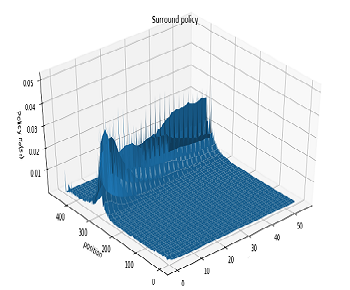
DIRL model is built upon a sequential time series model and General Adversarial Imitation Learning (GAIL). GAIL assists in learning the rewards and future trajectories are predicted using the sequential model. The model is optimized using reinforcement learning techniques by performing policy gradients on the rewards, that are obtained from the GAIL. The model is trained on expert naturalistic driving data recorded on German highways called HighD. The model predicts lateral, longitudinal position and velocity of surrounding vehicles. The accuracy of these predictions is evaluated by comparing these trajectories with expert data.
Images